Shrediquette derbe evo progress
Some images of the assembly process...:



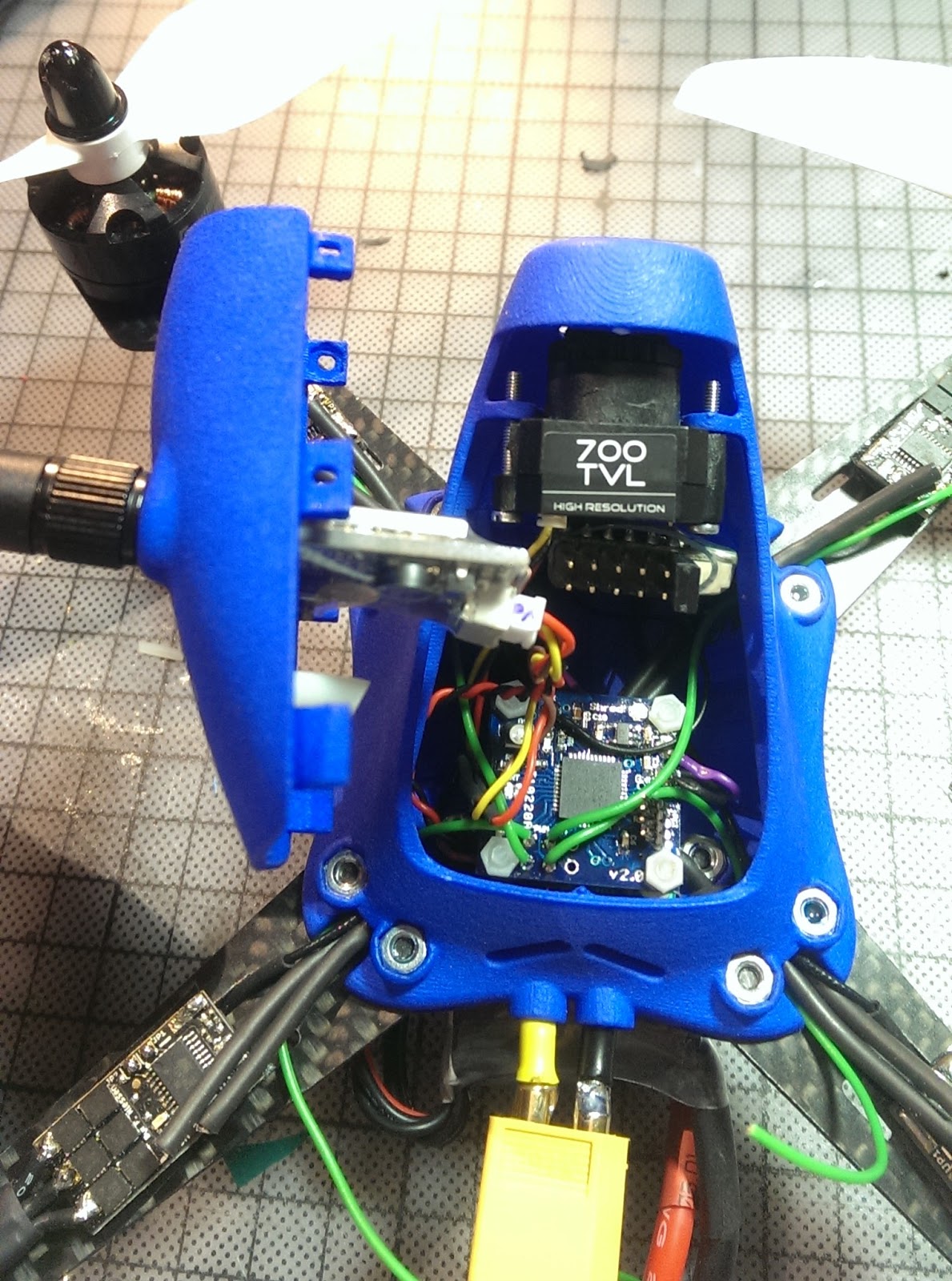
There is not much space inside the frame, but everything fits. The assembly also went quicker than I thought. I just need to replace all the motor shafts of the Graupner Ultra 2806 2300 kV motors (due to a hard crash), and then I am ready to go.
The take-off weight is just 447 grams.


There is not much space inside the frame, but everything fits. The assembly also went quicker than I thought. I just need to replace all the motor shafts of the Graupner Ultra 2806 2300 kV motors (due to a hard crash), and then I am ready to go.
The take-off weight is just 447 grams.





Comments
Post a Comment